Associate professor at Politecnico di Milano
I work on control theory.
I work on control theory.
An interactive room with a sensorized climbing wall. This is a technological space to explore new modes of interaction, new ways to support inclusion and rehablitation. And a playground to test our new sensors for motion analysis.
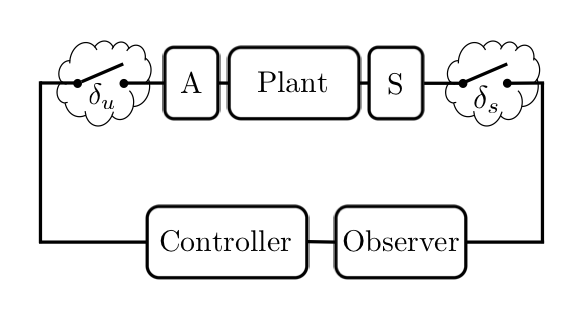
How do you control a system where sensors and actuators are spread over a network, and you don't have enough bandwidth to link them all at the same time? How do you design an optimal controller over such a network? And an event/self-triggered control law?
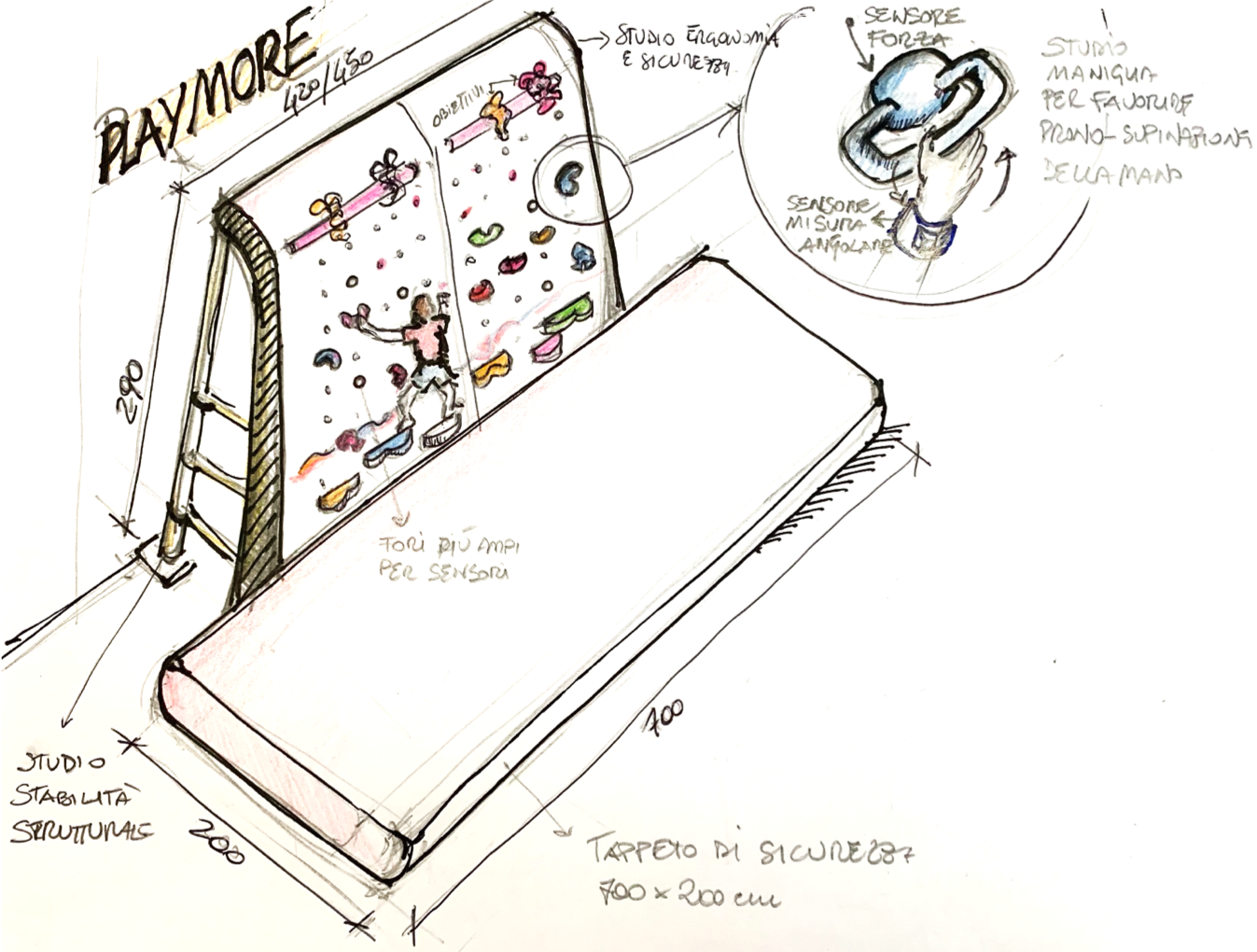
We are designing an adapted, senzorized, and reconfigurable climbing wall, optimized to help children with cerebral palsy recover some of their neuromotor skills. Adapted sport is a more engaging and often more effective alternative to standard rehabilitation. With our engineering background we are designing a smart climbing wall that will let children play and simultaneously track their improvements.
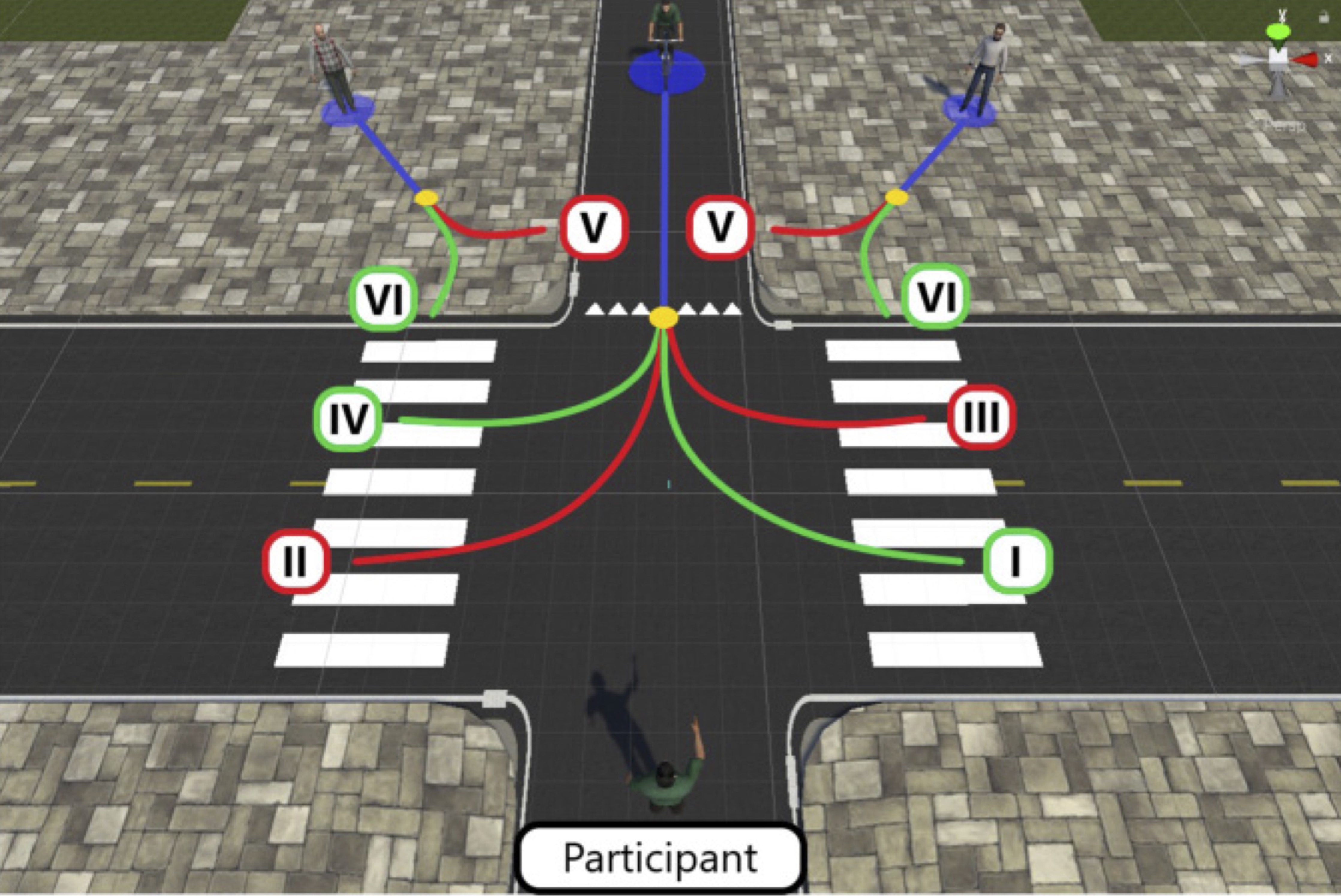
Cars are getting smarter, but can they become smart enough to understand their driver? Hint: we are working on it...
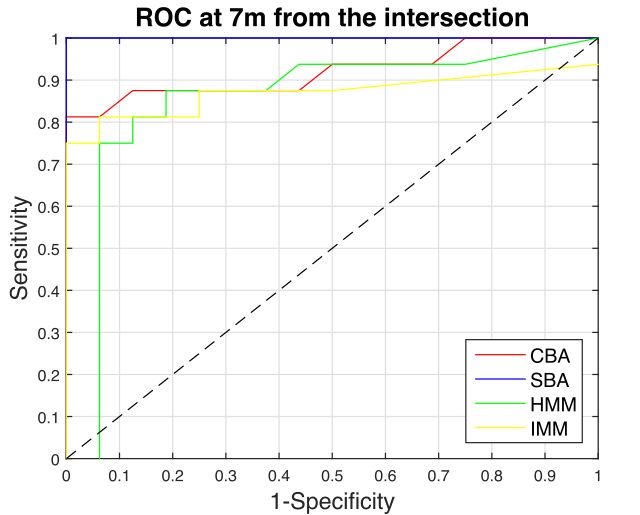
Algorithms to predict and control traffic can improve safety and reduce traveling time. One day, a fleet of fully autonomous cars will shuttle us efficiently from one side of town to the other. Until then cars will be driven by humans, and these algorithms will help us travel faster and safer using the technology available now.
We are engineers, and we like climbing.
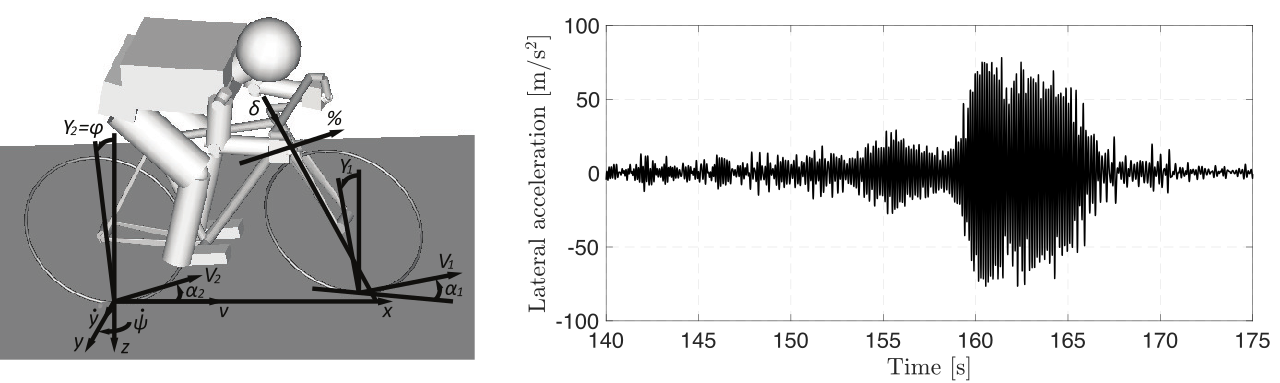
Easy as riding a bike. At 50km/h, as the handlebar wobbles beyond control with 6g lateral acceleration. We are using nonlinear dynamics to understand bicycle shimmy and help design safer racing bicycles. Project in collaboration with Prof. Magnani, who in the spare time is riding the sensorised bicycle.
I'm adapting operations research algorithms to control problems. In the simulation below, a group of reckless drivers head towards an intersection. They crash if they touch the car in front, or if two cars on different roads touch the red dot at the same time. On the right, we let them crash. On the left, our algorithm computes if a collision is about to happen, and corrects the trajectory at the very last moment to avert the collision.
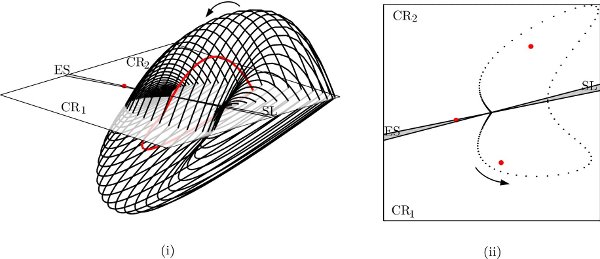
Alongside the above projects, I keep an eye on the world on nonsmooth systems, and in my spare time I try to figure out how we could learn to make sgn and tanh less confusing. Here's where these pictures come from.
 We are setting up ACCEPT, our new sensorized climing wall. Come try it at PlayMore!.
We are setting up ACCEPT, our new sensorized climing wall. Come try it at PlayMore!.